_1.png)

فناوریهای اپتیک و رباتیک؛
سیستم هدایت و ناوبری ربات مورچهای، بدون GPS
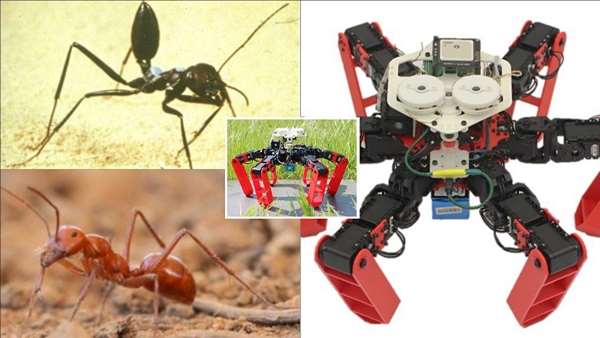
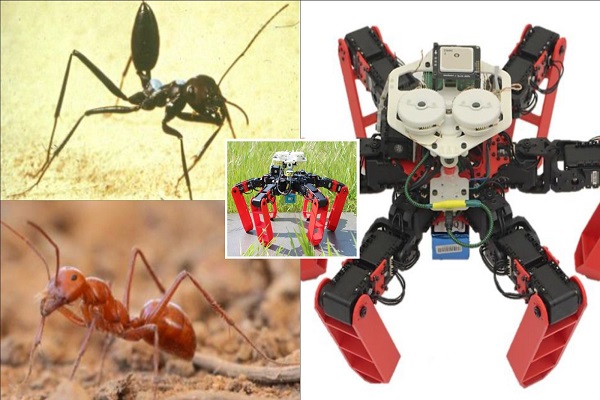
هدایت و ناوبری در محیط های سخت و خشنی مانند بیابانهای داغ، بدون سیستم موقعیت یابی جهانی (GPS) بسیار مشکل است. ولی چگونه یک ربات این توانایی را بدست آورده است؟ محققان فرانسوی با الهام از قابلیت ناوبری مورچه های صحرایی، رباتی (AntBot) را طراحی کردهاند که میتواند با استفاده از یک "قطب نما نوری" و یک سنسور حرکتی اپتیکی محیط اطراف را بررسی کند و سپس به خانه یا پایگاه اولیهاش بازگردد.
هدایت و ناوبری در محیط های سخت و خشنی مانند بیابانهای داغ، بدون سیستم موقعیت یابی جهانی (GPS) بسیار مشکل است. ولی چگونه یک ربات این توانایی را بدست آورده است؟ محققان فرانسوی با الهام از قابلیت ناوبری مورچه های صحرایی، رباتی (AntBot) را طراحی کردهاند که میتواند با استفاده از یک "قطب نما نوری" و یک سنسور حرکتی اپتیکی محیط اطراف را بررسی کند و سپس به خانه یا پایگاه اولیهاش بازگردد.
این تیم معتقد است که سیستم ناوبری الهام گرفته شده از مورچه، با خطای متوسط گزارش شده به اندازه 0.67 درصد، می تواند مکملی برای روشهای سنتی ناوبری در روبات های مستقل و یا حتی در وسایل نقلیه بدون راننده، باشد.
حوزه رباتیک با سرعت زیادی در حال پیشرفت است و ضروری است تا سیستمهای ناوبری نیز به سرعت تکامل یابند. ربات های خودکار و متحرک کاربردهای بیشماری مانند اکتشافات فرازمینی و یا جستجوی محیط پس از بلایای طبیعی، دارند. اما در چنین شرایطی موقعیت یابی اغلب به صورت دستی و یا توسط سیگنال های GPS و همراه با ارتباطات بی سیم، صورت می¬پذیرد. با توجه به این موضوع، تیم دانشگاهAix-Marseille فرانسه، سیستم ناوبری پشتیبان دقیق و جدیدی را برای زمانی که سیستم GPS پاسخگو نباشد، طراحی کرده است.
محققان برای انجام این کار، تاکتیکی را از مورچه های صحرایی قرض گرفته اند. بسیاری از مورچه ها از مسیرهای علامت گذاری شده فرومونی برای پیدا کردن مسیر خانه استفاده می کنند، ولی فرومون مورچههای صحرایی فورا در گرمای شدید محیط می-سوزد. در عوض، این حشرات زیرک طی فرآیندی، نور قطبیده آسمان و حرکت محیط اطراف پیش چشمانشان را مشاهده می کنند، و گام های خود را نیز در حین حرکت میشمارند. با استفاده از این روش مورچه های صحرایی می توانند صدها متر را در نور مستقیم و گرمای سوزان خورشید حرکت کنند و در آخر به طور مستقیم به سمت خانه بازگردند.
ربات مورچهای با استفاده از فرآیندی مشابه با این مورچهها در محیط اطراف خود حرکت میکند. تیم فرانسوی یک "قطب نمای نوری" برای کمک به جهت یابی ربات توسط نور پلاریزه، و یک سنسور حرکتی نوری برای اندازه گیری مسافت پیموده شده طراحی کردهاند. قطب نما نوری حساس به نور ماوراء بنفش ربات که تنها شامل دو پیکسل، و حساسیت طیفی آن از 270 تا 400 نانومتر است، توسط دو فیلتر قطبیده چرخان پوشیده شده است. این مجموعه نسبتا ساده معادل دو آرایه ای از 374 پیکسل است که هر کدام دارای یک زاویه قطبش خاصی هستند. این تیم توانسته است با چرخاندن فیلترها به صورت مکانیکی، هزینه تولید قطب نمای نوری را از حدود 78،000 یورو به چند صد یورو کاهش دهد. در سنسور دوم نیز از 12 پیکسل استفاده شده که حساس به تغییرات شدت نور برای اندازه گیری فاصله سفر می باشد. با استفاده از سنسورهای نوری، این ربات 45 سانتیمتری (ساخته شده با چاپگر 3 بعدی) قادر بود تا 14 متر مسیر طی کند و با قابلیت اطمینان بالا در آب و هوای ابری و آفتابی، به محل اولیه خود برگردد.
نتایج تست نشان داد که نه فاصله مسیر و نه شکل مسیر طی شده و نه شرایط آسمان، به طور قابل توجهی بر روی عملکرد بازگشت به خانه این ربات، مؤثر نیست و این سیستم برای ناوبری خودکار در محیط های ناهموار و هوای آزاد مناسب است. با این حال، قبل از اینکه این سیستم ناوبری الهام گرفته شده از طبیعت مورد استفاده گسترده قرار گیرد باید چندین چالش پیش روی خود را برطرف کند. به طور مثال باید بتواند در هنگام شب، فاصله های طولانی و زمین های با شیب تند نیز حرکت کند.
منبع:
https://www.osa-opn.org/home/newsroom/2019/february/antbot_navigates_without_gps/
این تیم معتقد است که سیستم ناوبری الهام گرفته شده از مورچه، با خطای متوسط گزارش شده به اندازه 0.67 درصد، می تواند مکملی برای روشهای سنتی ناوبری در روبات های مستقل و یا حتی در وسایل نقلیه بدون راننده، باشد.
حوزه رباتیک با سرعت زیادی در حال پیشرفت است و ضروری است تا سیستمهای ناوبری نیز به سرعت تکامل یابند. ربات های خودکار و متحرک کاربردهای بیشماری مانند اکتشافات فرازمینی و یا جستجوی محیط پس از بلایای طبیعی، دارند. اما در چنین شرایطی موقعیت یابی اغلب به صورت دستی و یا توسط سیگنال های GPS و همراه با ارتباطات بی سیم، صورت می¬پذیرد. با توجه به این موضوع، تیم دانشگاهAix-Marseille فرانسه، سیستم ناوبری پشتیبان دقیق و جدیدی را برای زمانی که سیستم GPS پاسخگو نباشد، طراحی کرده است.
محققان برای انجام این کار، تاکتیکی را از مورچه های صحرایی قرض گرفته اند. بسیاری از مورچه ها از مسیرهای علامت گذاری شده فرومونی برای پیدا کردن مسیر خانه استفاده می کنند، ولی فرومون مورچههای صحرایی فورا در گرمای شدید محیط می-سوزد. در عوض، این حشرات زیرک طی فرآیندی، نور قطبیده آسمان و حرکت محیط اطراف پیش چشمانشان را مشاهده می کنند، و گام های خود را نیز در حین حرکت میشمارند. با استفاده از این روش مورچه های صحرایی می توانند صدها متر را در نور مستقیم و گرمای سوزان خورشید حرکت کنند و در آخر به طور مستقیم به سمت خانه بازگردند.
ربات مورچهای با استفاده از فرآیندی مشابه با این مورچهها در محیط اطراف خود حرکت میکند. تیم فرانسوی یک "قطب نمای نوری" برای کمک به جهت یابی ربات توسط نور پلاریزه، و یک سنسور حرکتی نوری برای اندازه گیری مسافت پیموده شده طراحی کردهاند. قطب نما نوری حساس به نور ماوراء بنفش ربات که تنها شامل دو پیکسل، و حساسیت طیفی آن از 270 تا 400 نانومتر است، توسط دو فیلتر قطبیده چرخان پوشیده شده است. این مجموعه نسبتا ساده معادل دو آرایه ای از 374 پیکسل است که هر کدام دارای یک زاویه قطبش خاصی هستند. این تیم توانسته است با چرخاندن فیلترها به صورت مکانیکی، هزینه تولید قطب نمای نوری را از حدود 78،000 یورو به چند صد یورو کاهش دهد. در سنسور دوم نیز از 12 پیکسل استفاده شده که حساس به تغییرات شدت نور برای اندازه گیری فاصله سفر می باشد. با استفاده از سنسورهای نوری، این ربات 45 سانتیمتری (ساخته شده با چاپگر 3 بعدی) قادر بود تا 14 متر مسیر طی کند و با قابلیت اطمینان بالا در آب و هوای ابری و آفتابی، به محل اولیه خود برگردد.
نتایج تست نشان داد که نه فاصله مسیر و نه شکل مسیر طی شده و نه شرایط آسمان، به طور قابل توجهی بر روی عملکرد بازگشت به خانه این ربات، مؤثر نیست و این سیستم برای ناوبری خودکار در محیط های ناهموار و هوای آزاد مناسب است. با این حال، قبل از اینکه این سیستم ناوبری الهام گرفته شده از طبیعت مورد استفاده گسترده قرار گیرد باید چندین چالش پیش روی خود را برطرف کند. به طور مثال باید بتواند در هنگام شب، فاصله های طولانی و زمین های با شیب تند نیز حرکت کند.
منبع:
https://www.osa-opn.org/home/newsroom/2019/february/antbot_navigates_without_gps/
_2.png)
ارسال به دوستان